
POZİSYON SENSÖRLERİ NEDİR ?
Pozisyon sensörleri nedir ? Pozisyon sensörleri çeşitleri nedir ve nasıl kullanılırlar ? Enkoder , enkoder çeşitleri ve çalışma prensibi nedir ve nasıl kullanılır ? Bu ve benzeri sorulara yanıt aradığımız Pozisyon Sensörleri Nedir adlı yazımızla karşınızdayız.
Başlayalım.
POZİSYON SENSÖRLERİ
Adından da anlaşılacağı gibi, Pozisyon Sensörleri, bazı sabit nokta veya konumlardan ya da bir noktadan ya da bir noktadan referans alırlar ve bu sensörler “konumsal” olarak bize geri bildirim sağlarlar.
Pozisyon belirleme yöntemlerinden birisi, gidilen veya sabit bir noktadan uzaklaşılan mesafe gibi iki nokta arasındaki mesafe veya “dönme” (açısal hareket) gibi ,iki nokta arasındaki mesafe olabilecek kadar olan “mesafeyi” kullanmaktır.
Örneğin, zemin boyunca kat edilen mesafeyi belirlemek için bir robot tekerleğinin dönüşünü düşünebiliriz.
Her iki durumda da Pozisyon Sensörleri, bir nesnenin hareketini Doğrusal Sensörler kullanarak düz bir çizgide veya Dönme Sensörleri kullanarak açısal hareketiyle algılayabilir.
Potansiyometre
Tüm “Pozisyon Sensörleri” arasında en yaygın kullanılanı, potansiyometredir, çünkü ucuz ve kullanımı kolay bir pozisyon sensörüdür.
Hareketinde açısal (dönme) veya doğrusal (sürgü tipi) olabilen ve kontak kolu/sürgü ile iki uç bağlantısı arasındaki direnç değerinin elektrik sinyali olarak vererek değişmesine neden olan mekanik bir şafta bağlı bir kontak kolu temasına sahiptir ki bu direnç olan hattaki kontak kolu konumu ile direnç değeri arasında orantılı bir ilişki olan çıktıyı bizlere verir.
Başka bir deyişle, direnç pozisyon orantısıdır.
Potansiyometreler, yaygın olarak bulunan yuvarlak dönme tipi veya daha uzun ve düz doğrusal kaydırıcı türleri gibi çok çeşitli tasarım ve boyutlarda gelir.Pozisyon sensörü olarak kullanıldığında, hareketli nesne doğrudan potansiyometrenin dönme miline veya kaydırıcısına bağlanır.
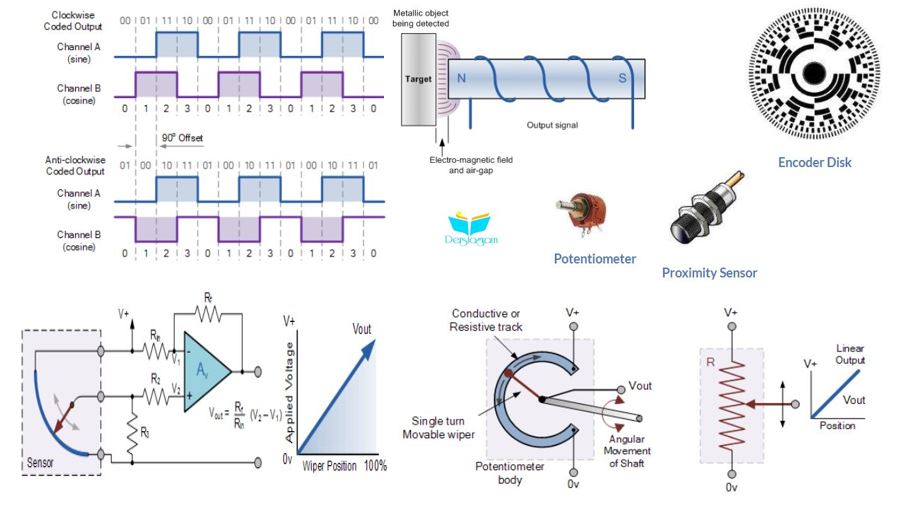
Dirençli elemanı oluşturan iki dış sabit bağlantı boyunca bir DC referans voltajı uygulanır. Çıkış voltajı sinyali, resimde gösterildiği gibi hareketli kontağın kontak kolu ucundan alınır.
Bu konfigürasyon, şaft konumuna orantılı olan potansiyel veya voltaj bölücü tip bir devre çıkışı üretir. Örneğin, potansiyometrenin rezistif elemanına 10V voltaj uygularsanız, maksimum çıkış voltajı, 10 volttaki besleme voltajına eşit olur, minimum çıkış voltajı 0 volta eşittir.
Ardından, potansiyometre kontak kolu çıkış sinyalini 0 ila 10 volt arasında değiştirirmek istersek kontak kolu 5 volt sağlıyor ise , sürgünün yarıda yani orta konumda olduğunu söyleyebiliriz.
Potansiyometre yapısı
Potansiyometreden gelen çıkış sinyali (Vout), direnç hattı boyunca hareket ederken merkez kontak kolu bağlantısından alınır ve şaftın açısal konumuna orantılı olarak değişir.
Basit Konumsal Algılama Devresi Örneği
Dirençli potansiyometre konum sensörleri birçok avantaja sahip olsalar da: düşük maliyetli, düşük teknolojili, kullanımı kolay vb. bir pozisyon sensörü olarak birçok dezavantaja da sahiptir -> hareketli parçalar nedeniyle aşınma, düşük hassasiyet, düşük tekrarlanabilirlik ve sınırlı frekans tepkisi.
Ancak potansiyometreyi pozisyon sensörü olarak kullanmanın bir dezavantajı vardır.Bu , kontak kolunun hareket aralığı (ve dolayısıyla elde edilen çıkış sinyali) kullanılan potansiyometrenin fiziksel büyüklüğü ile sınırlıdır.
Örneğin, tek turlu bir dönme potansiyometresi genellikle sadece maksimum 0 dereceden yaklaşık 240 ila 330 derece arasında sabit bir mekanik dönüşe sahiptir.Bununla birlikte, 3600 derece (10 x 360 derece) mekanik dönüşe kadar çok dönüşlü potansiyometreler de mevcuttur.
Potansiyometre türlerinin çoğu dirençli izleri için karbon filmi kullanır, ancak bu türler elektriksel olarak gürültülüdür (radyo ses seviyesi kontrolü üzerindeki çatlak) ve ayrıca kısa bir mekanik ömre sahiptir.
Ayrıca düz bir tel veya sarmal dirençli tel formundaki reostalar olarak da bilinen tel sargılı potansiyometreler de kullanılabilir, ancak tel sargılı potansiyometrelerin kontak kolu bir tel parçasından diğerine atlarken çözülme problemleri yaşanır ve logaritmik (LOG) çıkış, çıkış sinyalinde hatalara neden olur.
Bunlar da elektriksel gürültüden aslında nasibini alıyor diyebiliriz.
Yüksek hassasiyetli düşük gürültülü uygulamalar için iletken plastik dirençli eleman tipi polimer film veya sermet tipi potansiyometreler artık mevcuttur.
Bu potansiyometreler, düşük gürültülü, uzun ömürlü ve mükemmel çözünürlük veren, elektriksel olarak doğrusal (LIN) dirençli bir ize sahip yumuşak düşük sürtünmeye sahiptir ve hem çok turlu hem de tek turlu cihazlar olarak mevcuttur.
Bu tür yüksek hassasiyetli pozisyon sensörü için tipik uygulamalar bilgisayar oyunu kumanda kollarında, direksiyonlarda, endüstriyel ve robot uygulamalarındadır.
Endüktif Konum Sensörleri
Doğrusal Değişken Diferansiyel Transformatör(Linear Variable Differential Transformer)
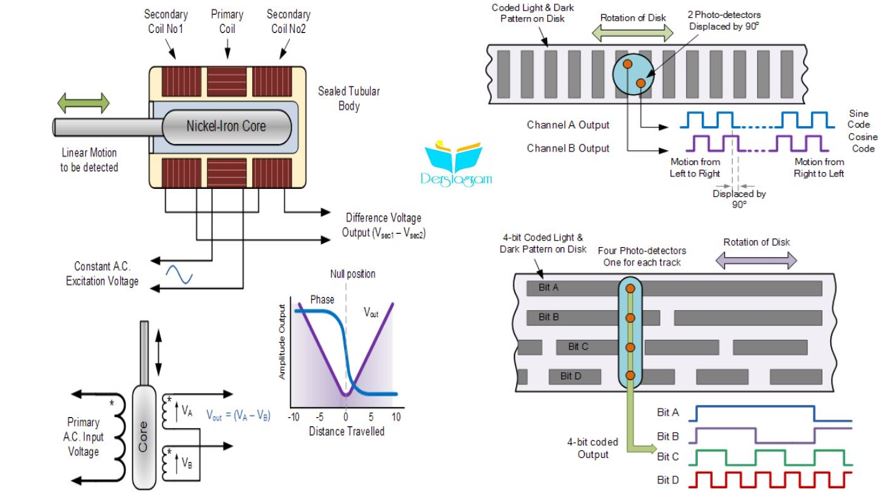
Mekanik aşınma problemlerinden muzdarip olmayan bir pozisyon sensörü, kısaca “Doğrusal Değişken Diferansiyel Transformatör” veya LVDT’dir.Bu, hareketi ölçmek için kullanılan ve AC trafo ile aynı prensipte çalışan endüktif bir tip pozisyon sensörüdür.Doğrusal olarak pozisyon değişimini ölçmek için çok hassas bir cihazdır ve çıktısı , hareketli çekirdeğinin konumu ile orantılıdır.
Temel olarak, biri birincil bobini oluşturan içi boş bir tüp üzerine sarılmış üç bobin ve biri seri olarak elektriksel olarak birbirine bağlanmış, aynı zamanda birincil bobinin her iki tarafının 180 derece dışında aynı sekonderleri oluşturan diğer iki bobinden oluşur.
Ölçülen nesneye bağlanan, LVDT’nin boru şeklindeki gövdesinin içinde aşağı veya yukarı hareket eden hareketli soft demir ferromanyetik bir çekirdek (bazen “armatür” olarak adlandırılır) bulunur.
“Uyarım sinyali” olarak adlandırılan küçük bir AC referans voltajı (2 – 20V rms, 2 – 20kHz), sırayla iki bitişik sargıya (transformatör prensipleri) bir EMF sinyalini indükleyen primer sargıya uygulanır.
Soft demir manyetik çekirdek armatürü tam olarak borunun merkezinde ve sarımlar ise “boş konumlu” ise, iki sekonder sargıdaki iki indüklenen emk birbirlerini faz dışı kaldıklarından iptal eder, böylece ortaya çıkan çıkış gerilimi sıfır olur.
Çekirdek bu boş ya da sıfır konumundan bir tarafa ya da diğerine hafifçe kaydırıldığı için, sekonderlerden birindeki indüklenen voltaj diğer sekonderden daha büyük olacak ve bir çıktı üretilecektir.
Çıkış sinyalinin kutupsallığı hareketli çekirdeğin yönüne ve yer değiştirmesine bağlıdır.Soft demir çekirdeğin merkezi , boş konumundan itibaren hareketi ne kadar büyük olursa, sonuçtaki çıkış sinyali de o kadar büyük olur.
Sonuç, çekirdek konumuyla doğrusal olarak değişen bir diferansiyel voltaj çıkışıdır.Bu nedenle, bu tip pozisyon sensöründen gelen çıkış sinyali hem öz yer değiştirmesinin doğrusal bir işlevi olan bir genliğe ve hem de hareket yönünü gösteren bir kutupsallığa sahip olur.
Çıkış sinyalinin fazı, manyetik çekirdeğin hangi yarısının içerisinde olduğunu ve böylece hareket yönünü bildiğini anlayabilmek için AD592 LVDT Sensör Amplifikatörü gibi uygun elektronik devreleri mümkün kılan temel bobin uyarma fazıyla karşılaştırılabilir.
Doğrusal Değişken Diferansiyel Transformatör (The Linear Variable Differential Transformatör)
Armatür merkezi konumdan bir uçtan diğer uca hareket ettirildiğinde, çıkış gerilimleri maksimumdan sıfıra ve tekrar tekrar maksimum olacak şekilde değişir, ancak bu sırada faz açısını 180 derece değiştirir.
Bu, LVDT’nin, büyüklüğü merkez konumundan hareket miktarını temsil eden ve faz açısı çekirdeğin hareket yönünü temsil eden bir çıkış AC sinyali üretmesini sağlar.
Bir doğrusal değişken diferansiyel transformatör (LVDT) sensörünün tipik bir uygulaması, bir basınç dönüştürücüsüdür, ölçülen basınç, bir güç üretmek için bir diyaframa karşı itme kuvveti uygular.
Daha sonra kuvvet, sensör tarafından okunabilir bir voltaj sinyaline dönüştürülür.
Dirençli bir potansiyometreye kıyasla lineer değişken diferansiyel transformatör veya LVDT’nin avantajları, lineerliğinin, yer değiştirmeye voltaj çıkışı olması ,mükemmel , çok iyi hassasiyet, iyi çözünürlük, yüksek hassasiyet ve sürtünmesiz çalışma olmasıdır.Ayrıca farklı ortamlarda kullanılmak için mühürlenirler.
Endüktif Proximity Sensörler
Yaygın olarak kullanılan bir diğer endüktif pozisyon sensörü tipi, Eddy akımı sensörü olarak da adlandırılan Endüktif Yakınlık Sensörüdür.
Gerçekte yer değiştirme veya açısal dönüşü ölçmemekle birlikte, esas olarak, önlerindeki veya yakınındaki bir nesnenin varlığını tespit etmek için kullanılır ve bu nedenle ismi “yakınlık sensörü” yani proximity sensör olarak adlandırılmıştır.
Yakınlık sensörleri, en basit manyetik sensör reed anahtarı olmak üzere algılama için manyetik alan kullanan temassız konum sensörleridir.Bir endüktif sensörde, bir endüktif döngü oluşturmak için elektromanyetik bir alandaki demir çekirdeğin etrafına bir bobin sarılır.
Bir ferromanyetik metal plaka veya metal vida gibi endüktif sensörün çevresinde oluşturulan eddy akım alanı içine bir ferromanyetik malzeme yerleştirildiğinde, bobinin endüktansı önemli ölçüde değişir.
Yakınlık sensörleri algılama devresi, çıkış voltajı olarak üretilen bu değişikliği tespit eder.Bu nedenle, endüktif yaklaşım sensörleri, Faraday’ın endüktans kanununun elektrik prensibi altında çalışır.
Endüktif Proximity Sensörler
Endüktif bir yaklaşım sensörünün dört ana bileşeni vardır;
Elektromanyetik alan üreten osilatör
Manyetik alanı üreten bobin
Bir nesne tespit edildiğinde alandaki herhangi bir değişikliği tespit eden algılama devresi
Normalde Açık (NO) ve Normalde Kapalı (NC) kontaklar
Endüktif yaklaşım sensörleri, nesnenin kendisinin herhangi bir fiziksel teması tespit edilmeden sensör kafasının önündeki metalik nesnelerin algılanmasına izin verir.
Bu, onları kirli veya ıslak ortamlarda kullanım için ideal kılar. “Algılama” yakınlık sensörleri aralığı çok küçüktür, tipik olarak 0,1 – 12 mm’dir.
Endüstriyel uygulamaların yanı sıra, endüktif yakınlık sensörleri de kavşaklardaki ve çapraz yollardaki trafik ışıklarını değiştirerek trafik akışını kontrol etmek için yaygın olarak kullanılır.Dikdörtgen endüktif tel halkaları asfalt yol yüzeyine gömülür.
Bir otomobil veya başka bir karayolu aracı bu endüktif döngüden geçtiğinde, taşıtın metalik gövdesi endüktansı değiştirir ve sensörü harekete geçirir ve böylece trafik ışıkları denetleyicisine bir araç beklediğini bildirir.
Bu tip konum sensörlerinin temel dezavantajı, “Omni-yönlü” olmalarıdır; yani yukarıda, altında veya yanlarında metalik bir nesne algılayacaklardır.
Ayrıca, Kapasitif Yakınlık Sensörleri ve Ultrasonik Yakınlık Sensörleri mevcut olmasına rağmen metalik olmayan nesneleri algılamazlar.
Yaygın olarak bulunan diğer manyetik konumsal sensörler arasında: reed anahtarları, Hall Efekt Sensörleri ve değişken relüktans sensörleri bulunur.
Rotary(Döner) Enkoderler
Döner Enkoderler, daha önce belirtilen potansiyometrelere benzeyen ancak dönen bir milin açısal pozisyonunu bir analog veya dijital veri koduna dönüştürmek için kullanılan temassız optik cihazlardır.Başka bir deyişle, mekanik hareketi elektriksel bir sinyale (tercihen dijital) dönüştürürler.
Tüm optik kodlayıcılar aynı temel prensipte çalışır.Bir LED veya kızıl ötesi ışık kaynağından gelen ışık, ikili, gri kod veya BCD gibi gerekli kod desenlerini içeren yüksek çözünürlüklü kodlanmış bir diskten geçirilir.
Foto detektörler diski dönerken tarar ve bir elektronik devre bilgiyi dijital bir forma dönüştürür ve milin gerçek açısal pozisyonunu belirleyen sayaçlara veya kontrolörlere beslenen bir ikili çıkış darbeleri akışı olarak işler.
İki temel döner optik kodlayıcı türü vardır: Artımlı Enkoderler ve Mutlak Pozisyon Enkoderleri.
Artımlı Enkoderler
Çeyrek enkoderler veya bağıl döner enkoder olarak da bilinen Artımlı Enkoderler, iki pozisyon sensörünün en basitidir.
Bunların çıktısı, enkoder diski olarak fotoselli bir düzenleme tarafından üretilen, yüzeyinde bölümler olarak adlandırılan eşit aralıklı saydam ve koyu çizgilerle ışık kaynağının üzerinde hareket eder veya döner.
Enkoder, sayıldığında, dönen milin açısal pozisyonunu gösteren bir kare dalga darbeleri akımı üretir.
Artımlı enkoderler “dörtlü çıkışlar” olarak adlandırılan iki ayrı çıkışa sahiptir.
Bu iki çıkış, çıkış sırasından tespit edilen şaftın dönme yönü ile birbirlerinden 90 derece fazda yer değiştirirler.
Disk üzerindeki saydam ve karanlık bölümlerin veya yuvaların sayısı, aygıtın çözünürlüğünü belirler ve desendeki çizgi sayısını artırmak, dönüş derecesi başına çözünürlüğü artırır.
Tipik olarak enkoder disklerin dönüşü başına 256 darbeye veya 8 bit’e kadar çözünürlüğe sahiptir.
En basit artımlı enkodere takometre denir.Tek bir kare dalga çıkışına sahiptir ve genellikle sadece temel konum veya hız bilgisinin gerekli olduğu tek yönlü uygulamalarda kullanılır.
“Quadrature” veya “Sinüs dalgası” enkoder tipleri daha yaygındır ve genellikle A kanalı ve B kanalı olarak adlandırılan iki çıkış kare dalgasına sahiptir.Bu cihaz iki fotodedektör kullanır, bunlar birbirlerinden 90 derece kadar ofset değerinde hareket eder ve böylece iki ayrı sinüs ve kosinüs sinyal çıkışı üretilir.
Basit Artımlı Kodlayıcı
Arc Tanjant matematik fonksiyonu kullanılarak şaftın radyan cinsinden açısı hesaplanabilir.Genel olarak, döner pozisyon enkoderlerinde kullanılan optik disk daireseldir, daha sonra çıktının çözünürlüğü şu şekilde verilir: θ = 360/n -> n = enkoder diskteki bölme sayısına eşittir.
O zaman, örneğin, artımlı bir enkodere 1 derece çözünürlük vermek için gereken segmentlerin sayısı: 1 derece = 360 /n
Bu nedenle, n = 360 olacaktır.
Aynı zamanda ilk olarak, A kanalı ya da B kanalı iki dönüş yönü vererek, A -> B’yi takip edecektir ya da B -> A’yı takip edecektir.Bu düzenlemeyi resimde görebilirsiniz.
Artımlı Enkoder Çıkışı
Bir pozisyon sensörü olarak kullanıldığında artımlı enkoderlerin bir ana dezavantajı, belirli bir rotasyondaki şaftın mutlak açısını belirlemek için harici sayaçlara ihtiyaç duymalarıdır.Güç geçici olarak kapatılırsa veya enkoder gürültü veya kirli disk nedeniyle pals’ı atlarsa, ortaya çıkan açısal bilgiler hataya neden olur.
Bu dezavantajın üstesinden gelmenin bir yolu da mutlak pozisyon enkoderlerini kullanmaktır.
Mutlak Pozisyon Enkoderleri
Mutlak Pozisyon Enkoderleri, Quadrate enkoderlerden daha karmaşıktır.Her bir dönüş pozisyonu için hem pozisyonu hem de yönü gösteren benzersiz bir çıkış kodu sağlarlar.
Enkoder diskleri, aydınlık ve karanlık bölümlerin ,çoklu eş merkezli “hatlarından” oluşur.Her hat, her hareket açısı için aynı anda benzersiz bir enkoder konum değerini okumak için kendi fotodedektöründen bağımsızdır.
Disk üzerindeki parça sayısı, enkoderin ikili “bit” çözünürlüğüne karşılık gelir, böylece 12 bitlik mutlak bir enkoder 12 parçaya sahip olur ve aynı kodlu değerler sadece devir başına bir kez görünür.
4-bit İkili Kodlu Disk
Mutlak enkoderin en büyük avantajlarından biri, güç kesintisi durumunda enkoderin tam konumunu “home” konuma geri getirme ihtiyacı olmadan, koruyan kalıcı hafızadır.Çoğu döner enkoder “tek turlu” cihazlar olarak tanımlanır, ancak ekstra kod diskleri ekleyerek birkaç devirden geri bildirim alan mutlak çok turlu cihazlar mevcuttur.
Mutlak konum enkoderlerinin tipik uygulaması, bilgisayar sabit sürücülerinde bulunur ve CD/DVD sürücüleri, yazdırma kafalarını kağıda doğru şekilde yerleştirmek için sürücülerin okuma/yazma kafalarının mutlak konumu izlenir veya yazıcı/çizicilerde bulunur.
POZİSYON SENSÖRLERİ SONUÇ :
Bugün Pozisyon Sensörleri Nedir adlı yazımızla karşınızdaydık.Umuyorum sizler adına da faydalı bir yazı olmuştur.Pozisyon/Konum Sensörleri hakkındaki bu yazımızda, nesnelerin konumunu veya varlığını ölçmek için kullanılabilecek birkaç sensör örneğine baktık.Bir sonraki derste, termistörler, termostatlar ve termokupllar gibi sıcaklıkları ölçmek için kullanılan sensörlere bakacağız.
İyi Çalışmalar