
PID KONTROL NEDİR ?
Pid kontrol nedir ? Pid kontrol nasıl çalışır ? Pid kontrol nerelerde kullanılır ? Pid kontrol prensipleri ve aşamaları nelerdir ? Pid ne anlama gelmektedir ? Bu ve benzeri sorulara cevap aradığımız Pid Kontrol Nedir adlı yazımızla karşınızdayız.
Başlayalım.
PID KONTROL
PID kontrolörleri, endüstriyel proses kontrolü için geniş bir uygulama yelpazesine sahiptirler ve kullanılırlar.Endüstriyel otomasyon sektörünün kapalı döngü operasyonlarının yaklaşık% 95’i PID kontrolörleri kullanmaktadır.
PID, Oransal-İntegral-Türev anlamına gelir.Bu üç kontrolör, bir kontrol sinyali üretecek şekilde birleştirilir.
Oransal : Proportional
Integral : İntegral
Derivative : Türevsel
Bir geri besleme kontrolörü olarak kontrol çıkışını istenilen seviyelerde sunar.Mikroişlemciler icat edilmeden önce, analog elektronik bileşenler tarafından PID kontrolü uygulandı.Ancak bugün tüm PID denetleyiciler, mikroişlemciler tarafından işlenmektedir.
Programlanabilir mantık denetleyicileri ayrıca dahili PID denetleyici talimatlarına sahiptir.PID kontrol cihazlarının esnekliği ve güvenilirliği nedeniyle, bunlar geleneksel olarak proses kontrol uygulamalarında kullanılır.
PID Kontrolörünün Çalışması
Düşük maliyetli basit ON-OFF kontrol cihazının kullanımıyla, sadece AÇIK veya tamamen KAPALI gibi sadece iki kontrol durumu mümkündür.Kontrol amacı için bu iki kontrol durumunun yeterli olduğu yerlerde sınırlı kontrol uygulaması için kullanılır.
Bununla birlikte, bu kontrolün salınımlı doğası kullanımını sınırlar ve dolayısıyla PID kontrolörleri tarafından değiştirilir.
PID kontrol cihazı çıkışı, kapalı çevrim işlemleriyle proses değişkeni ile ayar noktası/istenen çıkış arasında sıfır hata olacak şekilde tutar.PID, aşağıda açıklanan üç temel kontrol davranışını kullanır.
P-Kontrolör
Orantısal veya P denetleyici, geçerli hata e(t) ile orantılı çıktı verir.İstenen veya ayarlanan noktayı gerçek değer veya geri bildirim işlem değeri ile karşılaştırır.Elde edilen hata, çıktı almak için oransal sabit ile çarpılır.Hata değeri sıfır ise, bu denetleyici çıkışı sıfırdır.
Bu denetleyici, tek başına kullanıldığında biasing veya manuel sıfırlama gerektirir.Bunun nedeni, sürekli durum koşuluna asla ulaşamamasıdır.Kararlı bir işlem sağlar, ancak her zaman sabit durum hatasını korur.Orantısal sabit Kc arttığında yanıtın hızı artar.
I-Denetleyici
Süreç/İşlem değişkeni ile ayar noktası arasında her zaman bir sapma bulunan p-denetleyicinin sınırlanması nedeniyle, kararlı durum hatasını ortadan kaldırmak için gerekli eylemi sağlayan I kontrolörüne ihtiyaç vardır.
Hatayı, hata değeri sıfıra ulaşıncaya kadar bir süre boyunca entegre eder. Bu değer, hatanın sıfır olduğu son kontrol cihazına geçer.
Negatif hata meydana geldiğinde entegre kontrol çıkışı azalır.Yanıt hızını sınırlar ve sistemin kararlılığını etkiler.Tepki hızı, integral kazanç Ki azaltılarak artırılır.
Resimdeki şekilde görüldüğü gibi, I kontrolörünün kazancı azaldıkça, kararlı durum hatası da azalmaya devam eder.Durumların çoğunda, özellikle yüksek hızlı yanıtın gerekli olmadığı durumlarda PI kontrolörü kullanılır.
PI kontrol cihazını kullanırken, I kontrolör çıkışı, sistemdeki doğrusal olmayan durumlardan dolayı, sıfır hata durumunda bile integral çıkışın arttığı koşulların üstesinden gelmek için bir şekilde sınırlandırılmıştır.
D-Kontrolör
I-Kontrolör, hatanın gelecekteki davranışını tahmin etme yeteneğine sahip değildir.Bu yüzden ayar noktası değiştirildiğinde, normal olarak tepki verir.D-denetleyici, hatanın gelecekteki davranışını tahmin ederek bu sorunu giderir.
Çıktısı, türevin sabiti ile çarpılarak, zamana göre hata değişim oranına bağlıdır.Çıkış için tekme başlangıcını vererek sistem yanıtını arttırır.
Yukarıdaki şekilde D kontrolörünün yanıtı PI kontrolörüne göre daha fazladır ve aynı zamanda çıkış zamanını azaltmaktadır.I kontrolörün sebep olduğu faz gecikmesini dengeleyerek sistemin stabilitesini arttırır.Türevsel kazancın arttırılması, tepki hızını artırır.
Sonunda, bu üç kontrolörü birleştirerek, sistem için istenen cevabı alabildiğimizi gördük. Farklı PID algoritmaları için farklı üreticiler farklı dizaynlar üretmektedirler.
PID Kontrolörün ayarlama yöntemleri ;
PID kontrol cihazının çalışmasından önce, kontrol edilecek işlemin dinamiğine uygun şekilde ayarlanmalıdır.Tasarımcılar P, I ve D terimleri için varsayılan değerleri verir ve bu değerler istenen performansı veremez ve bazen kararsızlık ve yavaş kontrol performanslarına yol açar.
PID kontrolörlerini ayarlamak ve operatörün oransal, integral ve türev kazançlarının en iyi değerlerini seçmek için çok dikkat gerektirmesi için farklı ayar yöntemleri geliştirilmiştir.Bunlardan bazıları aşağıda verilmiştir.
Deneme ve Hata Yöntemi: Bu, PID denetleyici ayarının basit bir yöntemidir.Sistem veya denetleyici çalışırken, denetleyiciyi ayarlayabiliriz.
Bu yöntemde, önce Ki ve Kd değerlerini sıfırlamak ve sistem salınım davranışına ulaşana kadar orantılı terimi (Kp) arttırmak zorundayız.Salındığında, salınımların durması ve nihayet hızlı yanıt almak için D’yi ayarlaması için Ki’yi (İntegral terimi) ayarlayın.
Proses reaksiyon eğrisi tekniği:
Açık döngü ayar tekniğidir. Sisteme bir adım girişi uygulandığında yanıt üretir. Öncelikle, sisteme bazı kontrol çıkışlarını elle uygulamak ve yanıt eğrisini kaydetmek zorundayız.
Bundan sonra eğim, ölü zaman, eğrinin yükselme zamanını hesaplamalı ve PID terimlerinin kazanç değerlerini elde etmek için bu değerleri P, I ve D denklemleriyle değiştirmeliyiz.
Zeigler-Nichols yöntemi: Zeigler-Nichols, PID kontrol cihazını ayarlamak için kapalı döngü yöntemleri önermiştir.Bunlar sürekli bisiklet metodu ve sönümlü salınım metodudur.Her iki yöntem için prosedürler aynıdır ancak salınım davranışı farklıdır.
Bu durumda, önce Ki ve Kd değerleri sıfır iken p-denetleyici sabitini, Kp’yi belirli bir değere ayarlamalıyız.Sistem, sabit genlikte salınana kadar oransal kazanç artar.
Hangi sistemin sürekli salınım ürettiğine dair kazanım, nihai kazanç (Ku) olarak adlandırılır ve salınım periyodu, son periyot (Pc) olarak adlandırılır.Ulaşıldıktan sonra, P, I ve D değerlerini, Zeigler-Nichols tablosu ile PID kontrolörüne girebiliriz, aşağıda gösterildiği gibi, P, PI veya PID gibi kullanılan kontrolöre bağlıdır.
| Kc | Tı | Td | |
| P | Kv/2 | ||
| PI | Kv/2.2 | Pv/1.2 | |
| PID | Kv/1.7 | Pv/2 | Pv/8 |
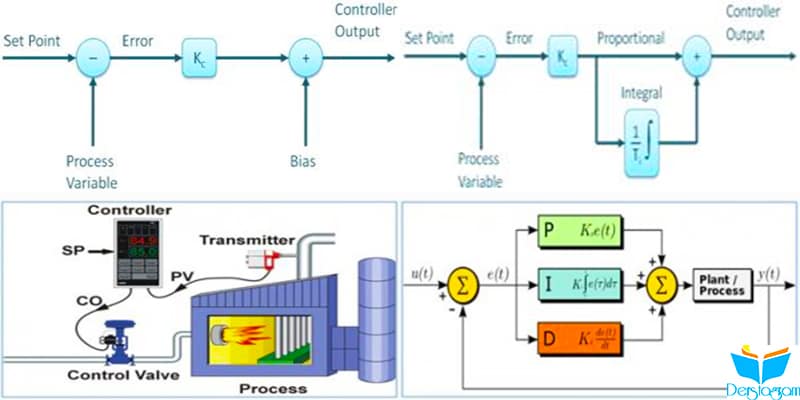
PID Denetleyici Yapısı
PID kontrol cihazı üç terimden oluşur, yani oransal, integral ve türev kontrolü.Bu üç kontrolörün kombine çalışması, proses kontrolü için kontrol stratejisi sağlar.PID kontrol cihazı basınç, hız, sıcaklık, akış vb. gibi proses değişkenlerini değiştirir.Bazı uygulamalar, kontrol sağlamak için iki veya daha fazla PID’in kullanıldığı kaskad ağlarında PID denetleyicileri kullanır.
Resimdeki şekil PID kontrolörünün yapısını göstermektedir.Çıktısını işlem bloğuna veren bir PID bloğundan oluşur. Proses/tesis, çeşitli endüstri / tesis süreçlerini kontrol etmek için aktüatörler, kontrol vanaları ve diğer kontrol cihazları gibi son kontrol cihazlarından oluşur.
İşlem yapısından gelen geri besleme sinyali bir ayar noktası veya referans sinyali u (t) ile karşılaştırılır ve karşılık gelen hata sinyali e (t) PID algoritmasına beslenir.Algoritmada orantılı, integral ve türevsel kontrol hesaplarına göre, kontrolör, santral kontrol cihazlarına uygulanan kombine tepki veya kontrollü çıktı üretir.
Tüm kontrol uygulamaları, tüm üç kontrol öğesine ihtiyaç duymaz. Pratik uygulamalarda PI ve PD kontrolleri gibi kombinasyonlar sıklıkla kullanılmaktadır.
PID KONTROL NEDİR SONUÇ :
Bugün Pid Kontrol Nedir adlı yazımızı sizlerle paylaştık.Umuyorum faydalı olmuştur.Elektrik Elektronik serisine kaldığımız yerden devam ediyoruz.
İyi Çalışmalar