
STEP MOTOR NASIL ÇALIŞIR ?
Step motor nedir ? Step motor nasıl çalışır ? Step motorun özellikleri nedir ? Step motorun servo motordan farkı nedir ? Step motor nerelerde kullanılır ? Bugün Step Motor İnceleme adlı yazımızı sizlerle paylaşıyoruz.
Başlayalım.
STEP MOTOR NEDİR ?
Step motoru, adım adım dönen bir DC motor türüdür.Elektrik sinyali step motora uygulandığında, motor kademeli olarak dönmektedir ve dönme hızı, elektrik sinyallerinin uygulandığı hıza ve dönme yönünde palsların çeşidine bağlıdır.
Bir step motor, normal olarak kalıcı bir mıknatıs olan bir rotordan oluşur.İfade edecek olarak ismine ise , motorun dönen bileşeni diyebiliriz.
Bir stator, sarım şeklinde olan başka bir bölümdür.Resim üzerindeki şemada, merkez stator sargısı ile çevrelenen rotordur.Bu dört fazlı sarım olarak adlandırılır.
Step Motorun Çalışması
Stator sargısındaki orta tapa, bobin topraklandığında sargıda akımın yön değiştirmesine izin verir. Statorun manyetik özelliği değişir ve rotoru seçici olarak çeker veya iter ki böylece motor için bir adım hareketi meydana gelir.
Adım Sırası
Motorun doğru hareketini sağlamak için bir adım dizisi takip edilmelidir.Bu kademeli sıra, stator fazına uygulanması gereken voltajı verir.Normalde 4 adımlı bir dizi takip edilir.
Sıra 1’den 4’e kadar olan aşamada izlendiğinde, saat yönünde dönme dönüşü elde edilir ve 4. adımdan 1’e kadar izlendiğinde, saat yönünün tersine dönüş olur.
| Adım No | A | A’ | B | B’ |
| 1 | 1 | 0 | 0 | 1 |
| 2 | 1 | 1 | 0 | 0 |
| 3 | 0 | 1 | 1 | 0 |
| 4 | 0 | 0 | 1 | 1 |
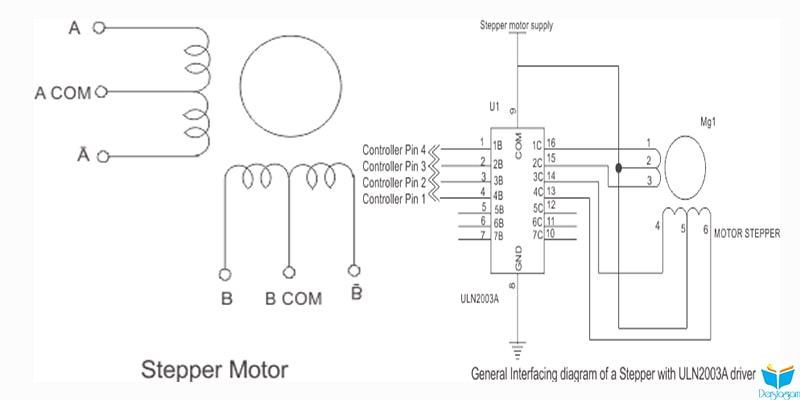
Arayüz Şeması
Resim üzerindeki şema, adım motorunun bir mikro denetleyici ile arayüzünü göstermektedir.Bu genel bir diyagramdır ve PIC mikro denetleyici, AVR veya 8051 mikro denetleyici gibi herhangi bir mikro denetleyici ailesine uygulanabilir.
Mikro denetleyici motoru çalıştırmak için yeterli akım sağlayamadığından, motoru sürmek için ULN2003 gibi bir sürücü kullanılır.Benzer şekilde, motoru çalıştırmak için bireysel transistörler veya herhangi bir başka sürücü IC(Integrated Circuit) de kullanılabilir.
Gerekirse, harici çekmeli dirençleri kullandığınız mikro denetleyiciye bağlı olarak pimlere bağlandığını görebilirsiniz.Motor asla denetleyici pimlerine doğrudan bağlanmamalıdır.Motor voltajı motorun boyutuna bağlıdır.
Tipik bir 4 fazlı uni-polar step motorun 5 terminali vardır. 4 fazlı terminaller ve toprağa bağlı merkez tapanın ortak bir terminalidir.
Saat yönünde modda sürekli rotasyon için programlama algoritması aşağıda verilmiştir.
Başlayalım ,
Motor için kullanılan port pinlerini çıkış olarak başlatın.
500 ms olduğunu varsaydığımız bir gecikme programı yazın
Pinler üzerinde ki ilk sıralı çıktılar -0 × 09
Gecikme fonksiyonunu çağırın
Pinler üzerinde ki ikinci sıralı çıktılar -0 × 0 c
Gecikme fonksiyonunu çağırın
Pinler üzerinde ki üçüncü sıralı çıktılar -0 × 06
Gecikme fonksiyonunu çağırın
Pinler üzerinde ki ilk sıralı çıktılar -0 × 03
Gecikme fonksiyonunu çağırın
3. adıma geçin
Adım açısı
Tam bir dönüşü tamamlamak için gereken adım sayısı, adım motorunun adım açısına bağlıdır.Adım açısı, adım başına 0,72 dereceden 15 dereceye kadar değişebilir.Bir dönüşü tamamlamak için bu 500 ila 24 adım arasında gerekli olabilir.Pozisyon kontrol uygulamalarında motor seçimi, adım başına gerekli olan minimum dönüş derecesine dayanmalıdır.
Yarım adım
Step motorlar, gerçek adım açısının yarısında kullanılabilir.Buna yarım adım denir.Bir motorun adım başına 15 derece olduğunu varsayalım, o zaman adım başına 7.5 derece dönecek şekilde programlanabilir, bu sayede özel bir yarım adımlama sırası uygulayabilirsiniz.
| Adım No | A | A’ | B | B’ |
| 1 | 1 | 0 | 0 | 1 |
| 2 | 1 | 0 | 0 | 0 |
| 3 | 1 | 1 | 0 | 0 |
| 4 | 0 | 1 | 0 | 0 |
| 5 | 0 | 1 | 1 | 0 |
| 6 | 0 | 0 | 1 | 0 |
| 7 | 0 | 0 | 1 | 1 |
| 8 | 0 | 0 | 0 | 1 |
8051 Mikrokontrolör için C Kodu
#include
#define out P1 //Motor düşük Port1 üzerine bağlandı
#define step 50 //motorun bir dönüşü 1.8 derece
Unsigned char i;
Void delay (unsigned char k);
Void main()
{
For (i=0 ; i>0 ; k–)
{
For (j=0; j<<40000; j++);
}
}
Step Motor vs. Servo Motor
Hem step motor hem de servo motor öncelikli olarak pozisyon kontrol uygulamalarında kullanılır.Fakat servo ve step motorların çalışma ve yapımında bir fark vardır.
Step motor, rotorları üzerinde çok sayıda kutup veya dişe sahiptir ve bu dişler, statorun elektriksel olarak mıknatıslanmış bobininin çekildiği veya itildiği manyetik kuzey ve güney kutupları gibi hareket eder.Bu, bir stepperın oluşturduğu adım hareketine yardımcı olur.
Diğer yandan, bir servo motorda, konum, motor şaftını hareket ettirmek için bir hata sinyali oluşturan özel devre ve geri besleme mekanizması tarafından kontrol edilir.
STEP MOTOR İNCELEME YAZISI SONUÇ :
Bugün Step Motor İnceleme adlı yazımızı sizlerle paylaştık.Step motorlara dair daha önce de kılavuz niteliğinde yazılar paylaşmıştık.Umuyorum konunun anlaşılması açısından faydalı olmaktadır.Diğer bir temel elektronik yazısında görüşmek üzere.
İyi Çalışmalar