
ENKODER ve ÇEŞİTLERİ NEDİR ?
Enkoder nedir ? Enkoder çeşitleri nedir ? Enkoder nasıl kullanılır ? PPR nedir ? Enkoder frekans hesapları nedir ? Enkoder hız hesaplamaları nasıl yapılır ? Bu ve benzeri sorulara yanıt aradığımız Enkoder ve Enkoder Çeşitleri Nedir adlı yazımızla karşınızdayız.
Başlayalım.
ENKODER VE ÇEŞİTLERİ FULL ANLATIM
Enkoderler, bir motor şaftının konumunu veya hızını ve yönünü veya diğer mekanik hareketleri belirlemek için kullanılır.
Döner tabla konumlandırma, toplama ve yerleştirme, makine montajı, paketleme, robotik ve daha fazlası gibi çeşitli uygulamaların hassas kontrolü için gerekli bilgileri sağlarlar.
Türüne bakılmaksızın, tüm enkoderler konum kontrolü için referans noktası olarak kullanılan bir yönlendirme algılama yöntemi sağlar.
Bir enkoder (endüstriyel kontroller için), konum bilgilerini alan ve bu verileri diğer cihazlara aktaran özel bir sensördür Konum bilgisi üç teknolojiden biri kullanılarak belirlenebilir ; optik, manyetik veya kapasitif.
Optik enkoderler, standart enkoder tiplerinin en doğru olanıdır.Bir optik enkoder seçerken, enkoderin toz, titreşim ve endüstriyel ortamlarda ortak olan diğer koşullardan kaynaklanan kirlenmeyi önlemek için yerleşik ekstra korumalara sahip olması önemlidir.
Manyetik enkoderler, optik enkoderlerden daha sağlamdır ve genellikle kir, buhar, titreşim ve diğer faktörlerin optik enkoder performansını etkileyebileceği ortamlarda kullanılır.
Manyetik enkoderler, optik enkoderlerin çözünürlüğünü veya doğruluğunu elde edemez.
Kapasitif enkoderler, endüstriyel algılama teknolojisi olarak göreceli olarak yeni gelenlerdir.Bu enkoderler manyetik enkoderler kadar dayanıklıdır ancak optik enkoderlerin yüksek çözünürlüklerini elde edemezler.
Bir enkoderin kullandığı algılama teknolojisinden bağımsız olarak, enkoder elektronik hareketini yapar ve bu hareketi endüstri standartında elektrik sinyallerine dönüştürür (resimdeki Elektriksel Çıkışları inceleyin).
Hafif görev, orta görev ve ağır görev, şafta ne kadar yük uygulanabileceğini belirtmek enkoderleri ayırt etmek için kullanılan terimlerdir.
Hafif hizmet tipi bir enkoder, şaft üzerinde sadece 10N (2.25 lbf) radyal kuvvet alabilir.Buna karşılık, ağır hizmet tipi bir enkoder, şaft üzerine 100N (22,5 lbf) radyal kuvvet uygulayabilir.
Çevresel derecelendirmelere göre, görev arttıkça daha da güçlendirilmiştir yeni nesil enkoderler.
Hafif görev enkoderleri tipik olarak IP40 ve IP50’dir (toz geçirmez); orta ve ağır işler enkoderleri IP65 (sıçrama korumalı) kadar yüksek olarak değerlendirilebilir.
Döner vs Doğrusal Enkoderler (Rotary vs Linear)
Enkoderler için iki temel geometri vardır -> doğrusal ve döner.
Döner ve doğrusal enkoderler benzer şekillerde çalışır.İsimlerin ima ettiği gibi, doğrusal enkoderler bir yol boyunca hareketi ölçer ve döner enkoderler dönme hareketini tanımlar.
Böylece uygulama hangi enkoderin işe en uygun olduğunu belirler.
Doğrusal bir enkoder genellikle bir ölçek (kodlanmış bir şerit) ve konum belirlemek için ölçeklerin kodlama arasındaki boşluğu okuyan bir algılayıcı “kafa” dan oluşur.
Doğrusal bir enkoderin çözünürlüğü, mesafe başına darbeler<-> palslar (inç başına darbeler (ppi), milimetre başına darbeler vb.) ile ölçülür.
Ölçek (kodlanmış şerit), içine veya üstüne gömülü işaretlerle, kafa tarafından okunan belirlenmiş bir çözünürlüğe sahiptir.100 ppi çözünürlüğe sahip doğrusal bir enkoder, hareketin her bir inçinde 100 işaret okuyacaktır.
Doğrusal enkoder çözünürlüğü ölçümünden farklı olarak, döner enkoder çözünürlüğü “satır sayısı” olarak da bilinen devir başına darbelerde (PPR) ölçülür.
Dönel enkoder genellikle bir iç kodlanmış diskten ve döner pozisyonu okumak için kullanılan bir algılama kafasından oluşur.Bir doğrusal enkoder daha çok bir ölçüm tekerleği gibi iken, doğrusal bir enkoder bir şerit metreye benzer.
100 ppr çözünürlüğe sahip bir döner enkoder her devir için kodlanmış diskinde 100 işaret okuyacaktır.
Artımlı ve Mutlak Enkoder (Incremental vs. Absolute)
Enkoderler artan ve mutlak stillerde gelir.
Doğrusal ve döner enkoderlar gibi, artımlı ve mutlak enkoderlar da benzerliklere sahiptir, ancak kablolama ve hareket tanımlamasında farklıdırlar.
Artımlı bir enkoder, şaftın nispi hareketi hakkında bilgi sağlamak için sadece darbeleri okur. Çalıştırıldığında konum hakkında hiçbir bilgisi yoktur; enkoder açıldığından beri şaftın ne kadar hareket ettiğini gösterebilir.
Bu pozisyon değişikliklerini elektriksel “darbelerle” raporlar.Bu darbe akışları ya tek kanallı (enkoderdan bir çıkış kablosu) ya da çift kanallı (iki kablo – ayrıca aşağıdaki “Quadrature” bölümüne de bakın) olabilir.
Artımlı bir enkoderi üzerinde numarasız bir şerit metre olarak düşünün, sadece onay işaretlerini hayal edin.Ne kadar uzağa gittiğinizi söyleyebilirsiniz, ancak bilinen bir noktadan ölçüm yapmadığınız sürece tam olarak nerede olduğunuzu bilmiyorsunuz gibi düşünebilirsiniz.
Quadrature Çıkışı Nedir?
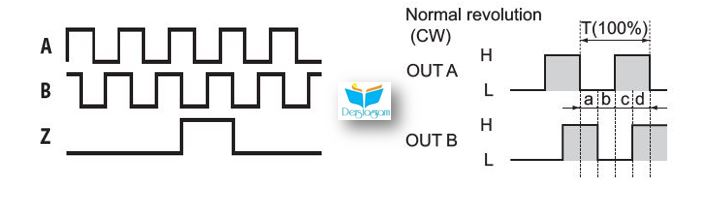
Quadrature çıkışı, enkoder kasasının içindeki optik disk üzerinde, 90 derecelik faz kayması ile ayrılan iki farklı “slot” veya kanal seti (A ve B) kullanır (resim üzerinde görebilirsiniz).
Bu iki çıkış Açık veya Kapalı olabilir, bu da her çözünürlük segmentinde dört farklı “durum” ile sonuçlanır.Resim üzerinde, dörtlü çıktının dört farklı durumunu görebilirsiniz.
Zaman dilimi “a”: A = Kapalı ve B = Açık
Zaman dilimi “b”: A ve B her ikisi de Kapalı
Zaman dilimi “c”: A = Açık ve B = Kapalı
Zaman dilimi “d”: A ve B her ikisi de Açık
Bir dörtlü çıkış için çıkış zamanlama diyagramı, saat yönünde dönerken, A = ON, ardından B = ON gösterir.
Bu nedenle, devir başına 100 darbe (bir A kanalının veya B kanalının 100 slotu) çözünürlüğünde bir dörtlü enkoder aslında enkoderin her bir devri için 400 farklı durum üretecektir.
Bu yüzden dörtlü enkoderlara bazen x4 (4 kez) enkoderler denir.
A ve B’nin Açılması ve Kapanması, Enkoder şeması A = On, ardından B = On ve saat yönünde döndürüldüğünde enkoderin hangi yönde döndüğünü de gösterir.
Bu enkoder saat yönünün tersine döndürülürse, önce B Açık, sonra A Açık olur.
Enkoderler, dörtlü modeline göre yön tanımlarında farklılık gösterebilir.
Z-Pals veya İndeks Kanalı
Bazı artımlı enkoderler, İndeks Kanalı veya Z darbesi (sıfır konum darbesi) adı verilen başka bir kanala sahiptir.
Bu çıkış, enkoder devir başına bir kez darbeli ve enkoder diskin enkoder içindeki sabit sıfır konumunu geçtiğinde belirtmek için kullanılır.
Z-darbesi bir sayacı sıfırlamak için kullanılabilir veya çok hassas konumlandırma için kullanılabilir. Örneğin, geri besleme cihazı olarak artan enkoder kullanan bir servo sürücüyü düşünün.
Servo harici bir sinyale (bir yakınlık anahtarı, mekanik limit anahtarı vb.) sahiplik yapıyor olabilir ve daha sonra son derece hassas konumlandırma için enkoderin Z-pulsunun bir sonraki oluşumuna devam edebilir.
Genellikle, enkoderin Z-darbesi fabrika ayarlıdır ve taşınamaz.Bununla birlikte, birkaç enkoder ailesi, enkoderin gövdesinin kurulumdan sonra döndürülmesini veya “ayarlanmasını” sağlayan “servo montaj kelepçeleri” sunar, böylece Z-darbe sinyali bir makine fonksiyonuna göre istenen pozisyonda gerçekleşir.
Z-darbeli Zamanlama Diyagramı
Bu zamanlama şeması 5 PPR enkoder içindir.Z darbesinin B çıktısının tamamı boyunca açık kaldığına dikkat edin.
Buna karşılık, tek bir dönüş, döner, mutlak enkoder, ilk açıldığında bile tam olarak hangi açıda olduğunu bildirebilir.
Bu enkoderlar genellikle endüstriyel kontrol ve bir homing dizisini hızlı veya kolay bir şekilde gerçekleştiremeyen robotlardaki uygulamalar için kullanılır.
Mutlak bir enkoder bir pusula gibidir:
Standart bir mutlak enkoder, artımlı enkoderlara (ppr, ppi, vb.) benzer bir çözünürlüğe sahiptir.Yine de, yüksek hızlı pals akışlarının bir çıkışı yerine, bir ikili biçimde çıktı belirtilir.Maksimum enkoder çözünürlüğü = 2^n (burada n = enkoderin çıkış tellerinin sayısı) eşit olur.
Böylece, bir 4ppr enkoderda 2 çıkış, 8ppr enkoderda 3 çıkış var, 16ppr enkoderda 4 çıkış vardır vb. Enerji kesilirse, mutlak enkoderin her konumu, güç geri geldiğinde konumun gerçek değeri bilinecektir.
Tek dönüşlü mutlak enkoderlerin bir dezavantajı vardır: güç verildiğinde enkoderin kesin açısı açıktır, ancak çalıştırmadan önce yapılan dönüşlerin sayısı açık değildir.
Çok dönüşlü mutlak enkoderlar bu sorunu çözmek için kullanılır.
Çok dönüşlü mutlak enkoderler genellikle, güç kapalıyken bile enkoderin döndüğünü izleyen bir pil veya süper kapasitöre sahiptir.Çok dönüşlü bir mutlak enkoder, devir başına bir kez artan bir ölçüm tekerleği gibidir.
Bu enkoderlar tipik olarak seri iletişime sahiptir ve konum bilgilerinin kodunu çözmek için özel alıcılar gerektirir.
Genelde, artımlı enkoderler yüksek hızlı girişlere bağlanmalıdır (her ne kadar yüksek hızlı pals dizisi üretmeyen PPR enkoderler olsa da).
Bununla birlikte, mutlak enkoderler, genel amaçlı Giriş/Çıkışlara bağlı olarak tasarlanmıştır.
Gri Kod(Gray Code)
Tek dönüşlü mutlak enkoderleri seçerken bir kez daha göz önünde bulundurun: çoğu enkoder standart ikili kodda sayılmaz.
İkili sayma yolunun normal olarak bir örneği:
Ondalık # // İkili Kod
12 // 01100
13 // 01101
14 // 01110
15 // 01111
16 // 10000
17 // 10001
18 // 10010
Ondalık 15’ten 16’ya geçişe dikkat edin:
5 basamağın tümü bir kerede durumu değiştirir.
PLC, bu geçiş gerçekleştiğinde girişleri okuyorsa, kötü bir değerin PLC tarafından geçici olarak kodu çözülebilir (en azından bir tarama için), çünkü her çıktı aynı anda anında değişebilir (fark nanosaniye olabilir).
Bir makinedeki çıkışlar enkoder konumuna göre açılıp kapatıldığında, bu büyük bir sorun yaratabilir. Bu çok sık olmayabilir, ancak PLC giriş görüntü tablosunu her taramada (yüzlerce, saniyede binlerce olmasa da) güncellediğinde, okuma pozisyonundaki herhangi bir aksaklık sorun olabilir.
Aynı anda birden fazla geçişi okumak için bu sorunla mücadele etmek için Gray Code geliştirilmiştir.
Gray Code, bir kerede yalnızca bir bit artış sağlayan özel bir tür ikilidir. Her geçişte yalnızca bir bit değiştiğinden, bir PLC’nin hatalı konum verilerinin kodunu çözmeye çalışması olasılığı çok daha düşüktür.
Ondalık # // İkili Kod // Gri Kod
0 // 0000 // 0000
1 // 0001 // 0001
2 // 0010 // 0011
3 // 0011 // 0010
4 // 0100 // 0110
5 // 0101 // 0111
6 // 0110 // 0101
7 // 0111 // 0100
Gray Kodunun tek dezavantajı, bit değişimi durumu olarak değeri tanımanın çok sezgisel olmamasıdır.Ancak, gray kodun kodunu çözme mantığı çok basittir ve minimum merdiven programlaması ile yapılabilir.
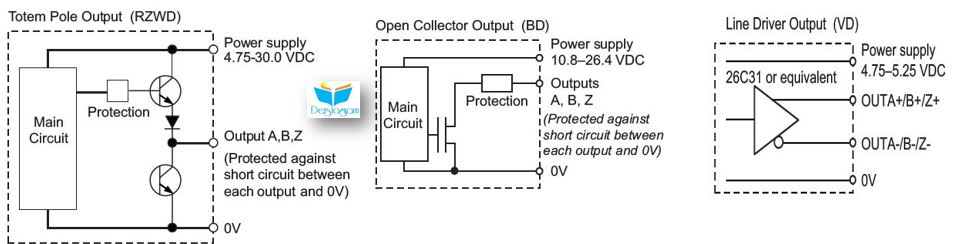
Artımlı Enkoderler İçin Elektrik Çıkışı
Artımlı enkoderler çeşitli tipte elektrik çıkışları sunar: Line Driver, NPN Open Collector veya Push-Pull (Totem Pole).
Bir Line Driver çıkışı diferansiyel bir sinyaldir ve kanal başına iki benzersiz çıkış kablosu gerektirir (Resimde görebilirsiniz).
Tipik kablo gösterimleri A, A- (A “değil”), B, B- (B “değil”) vs.’dir. Kanal A Açık olduğunda, A ve A- arasında pozitif voltaj vardır.
Kanal A KAPALI olduğunda, A ve A- arasında negatif voltaj farkı vardır.
Gerilim farkının büyüklüğü 2.5V’tan büyük olacaktır.
Aynısı B ve Z kanalları için de geçerlidir.
Line Drive çıkışları yüksek kalitede sinyal sağlar ve elektriksel gürültüye karşı oldukça bağışıklıdır.
Line Driver enkoderleri, sürücüyle donatılmış PLC veya hareket kontrol cihazı girişlerini kablolamak için çok basittir.
Her çıkış (A, B, Z) iki kablo, ayrıca güç kaynağı için iki kablo (genellikle 5VDC) gerektirir.
Artımlı enkoder hattı sürücüsü çıkışı, kanal başına iki benzersiz çıkış kablosu ve otomasyon sistemi Giriş/Çıkışa karşılık gelen iki giriş gerektirir.
İkinci bir çıkış tipi Açık Kollektördür (NPN transistörü).
NPN Açık Kollektör tip enkoderlerin “sink” akımı source (PNP) PLC girişlerinden gelir.
Sink ve source girişleri basitçe bir transistördeki akım akışına işaret eder.
Açık Kollektör enkoderlerinin A, B, Z ve 0V kabloları (ve elektronik devreyi çalıştırmak için +VDC için bir kablo) vardır.
NPN Açık Kollektör (sinking) enkoderler, ana PLC veya hareket kontrol cihazının PNP (source) girişlerine sahip olmasını gerektirir.
Açık kollektör enkoderlar genellikle geniş bir voltaj aralığını kabul eder.
Üçüncü tip enkoder çıkışı, Push-Pull çıkışı olarak da bilinen bir İtme-Çekme devresidir.
Push-Pull çıkışı, PLC’ye akım olarak source veya sink olarak verebilecek özel bir devredir.
Bu enkoder devresinin anahtarı, enkoderdeki transistör çiftidir.
Bir transistör Açık iken, diğeri Kapalı olarak çalışmaktadır.
PLC akım sağlarsa (PLC source veya PNP girişlerine sahipse), Push-Pull enkoder akımı alt transistörden geçirebilir.
PLC akımı sink (PLC sinking veya NPN girişleri var), enkoder akımı üst transistörden alır.
Hız Sınırlamaları
Döner enkoderler söz konusu olduğunda iki hız sınırlaması vardır ; mekanik ve elektrik olarak.
Mekanik hız sınırı, her bir ürün için sabit bir RPM değeridir; bu, enkoderin olası hasara uğramaksızın dayanabileceği maksimum hızdır.
Her enkoder ailesi için elektriksel hız limiti, enkoderin içindeki elektronik cihazların maksimum anahtarlama hızı (frekans tepkisi) tarafından uygulanır.
Elektriksel hız limiti şu formülle belirlenir:
Maksimum Elektriksel Hız = (Maksimum Frekans Cevabı / devir başına dönüş) x 60sn/dak
Maksimum Frekans Tepkisi, her enkoder ailesi için sabit bir sayıdır (Hertz cinsinden).Bu durum aslında elektronik cihazların fiziksel olarak Off (Kapalı) ve On (Açık) arasında değişebilmesini ifade eder.
Maksimum Elektrik Hızı PPR’a bağlı olduğundan, her enkoderin belirli bir enkoder ailesi için çözünürlüğü farklı bir Maksimum Elektrik Hızına sahiptir.
Örneğin, 5000 RPM’de dönen bir 3 PPR enkoder 250Hz’de darbeler üretirken, 5000 PRM’de dönen 1000 bir PPR enkoder çok daha yüksek 83 kHz hızında darbeler üretir.
1000 PPR enkoder, 3 PPR enkoderden çok daha düşük bir maksimum hıza sahiptir.
Hız üzerindeki mekanik bir limit, birçok enkoder için tipiktir, ancak bir uygulama yüksek hız veya yüksek çözünürlük gerektiriyorsa, enkoderin hem mekanik hem de elektriksel hız limitlerinin dikkate alınması gerekir.
İki maksimum hızın düştüğü bir enkoderin, gitmesine izin verilen en yüksek hızdır.
Örneğin, belirli bir enkoder 3000 RPM Maksimum Mekanik Hıza sahip olabilir.Maksimum Frekans Tepkisi (elektrik hızı) 100 kHz olabilir.
Bu nedenle, bu enkoderin elektroniklerin hızına göre dönebildiği en yüksek hız;
(100kHz/100 PPR) x 60s/dak = 60.000 RPM’dir.
Bu da 3.000 RPM’nin mekanik sınırından çok daha yüksektir.Bu enkoder 3.000 PRM’den (mekanik limit) daha hızlı döndürülmemelidir.
Yukarıdaki bilgiler çoğunlukla artımlı enkoderlere yönelik olsa da, aynı hesaplamalar mutlak enkoderler için de geçerlidir.
Mutlak enkoderler için ekstra bir husus, genel amaçlı DC girişlerinin yüksek hızlı girişler olmamasıdır, bu nedenle genel amaçlı DC giriş kartlarının Kapalı-Açık ve Açık-Kapalı yanıt süreleri, mutlak enkoderin frekans değiştirme hızını enkoderdan daha fazla sınırlayabilir.
ENKODER ve ÇEŞİTLERİ NEDİR SONUÇ :
Bugün Enkoder ve enkoder çeşitleri nedir adlı yazımızı sizlerle paylaştık.Umuyorum faydalı bir yazı olmuştur sizler adına.
İyi Çalışmalar