
DC & STEP MOTORLAR NEDİR ?
DC ve Step motorlar nedir ve nasıl çalışır ? DC motorlar nerelerde ve nasıl kullanılır ? DC motorların özellikleri nedir ? Bu ve benzeri sorulara yanıt aradığımız DC Motorlar Hakkında Herşey adlı yazımızla karşınızdayız.
Başlayalım.
DC & STEP MOTORLAR
DC Motorlar, elektrik enerjisini mekanik enerjiye dönüştüren ve sürekli olan aktüatörlerdir.DC motorlar pompaları, fanları, kompresörleri, tekerlekleri vb. döndürmek için kullanılabilecek sürekli bir açısal dönüş üretir.
Yaygın döner DC motorların yanı sıra sürekli bir lineer hareket üretebilen doğrusal motorlar da mevcuttur.
Temel olarak üç tip konvansiyonel elektrik motoru mevcuttur:
AC tipi Motorlar, DC tipi Motorlar ve Step Motorlar.
AC Motorlar genellikle yüksek güçlü ,tek veya çok fazlı endüstriyel uygulamalarda kullanılır, sabit bir dönme momenti ve fanlar veya pompalar gibi büyük yükleri kontrol etmek için gereklidir.
Elektrik motorları ile ilgili bu eğitici yazıda, konum kontrolü, mikroişlemci, PIC ve robotik tip devrelerde kullanılan basit DC Motorlar ve Step Motorlara bakacağız.
DC Motor Temelleri
DC Motor veya Doğru Akım Motoru, sürekli hareket üretmek için en sık kullanılan aktüatördür ve dönüş hızı kolayca kontrol edilebilir, bu sayede hız kontrolü, servo tipi kontrol ve/veya konumlandırma gereken uygulamalarda kullanım için idealdir.
Bir DC motor iki parçadan oluşur, sabit kısım olan bir “Stator” ve dönen kısım olan bir “Rotor”.
Sonuç olarak, temelde üç tip DC Motor mevcuttur.
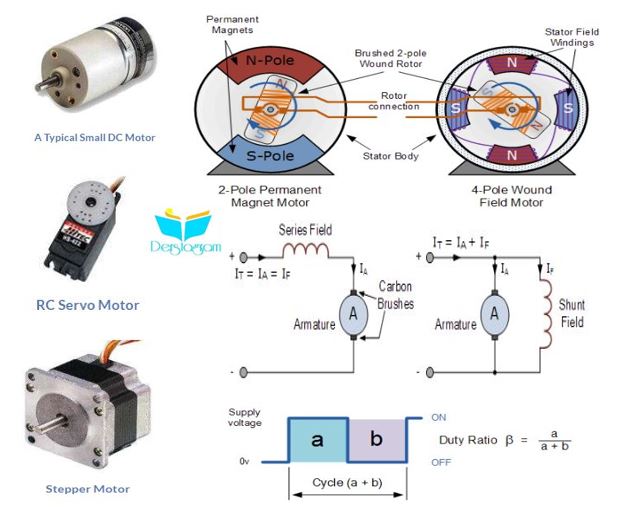
Fırçalı Motor – Bu motor tipi, bir komütatör ve karbon fırça tertibatından bir elektrik akımını geçirerek, dolayısıyla “Fırçalı” terimi, bir sarılı rotorda (dönen kısım) bir manyetik alan üretir.
Statorlar (sabit kısım) manyetik alan, bir sarılı stator alanı sargısını kullanılarak veya daimi mıknatıslar kullanılarak üretilir.Genellikle fırçalı DC motorlar ucuz, küçük ve kolayca kontrol edilebilir.
Fırçasız Motor – Bu motor türü, kendisine bağlı sabit mıknatıslar kullanarak rotorda manyetik bir alan oluşturur ve elektronik ortamda komütasyon sağlanır.Genel olarak daha küçük fakat daha klasik olan DC motorlara göre daha pahalıdırlar çünkü statorda gerekli stator alanı dönme sırasını üretmek için “Hall efekti” anahtarlarını kullanırlar ancak eşdeğer fırçalanmış tiplerden daha iyi tork/hız özelliklerine sahiptirler, daha verimlidirler ve daha uzun çalışma ömrüne sahiptirler.
Servo Motor – Bu motor, temel olarak rotor miline bağlı bir tür konumsal geri besleme kontrolüne sahip olan fırçalanmış bir DC motordur.Bir PWM tipi kontrolöre bağlanır ve kontrol edilirler ve çoğunlukla konum kontrol sistemlerinde kullanılırlar.
Normal DC motorlar, uygulanan DC voltajı tarafından dönme hızlarının ve çıkış torku motor sargılarının içinden geçen akım tarafından belirlendiği için neredeyse doğrusal özelliklere sahiptir. Herhangi bir DC motorun dönme hızı, dakikada birkaç devirden (dev/dak) veya dakikada binlerce devir arasında değişebilir, bu da onları elektronik, otomotiv veya robotik uygulamalar için uygun hale getirir.
Bunları redüktörlere bağlayarak çıkış hızları azaltılabilir, aynı zamanda motorun tork çıkışını yüksek hızda arttırabilir.
“Fırçalı” DC Motor
Yaygın kullanılan bir fırçalı DC Motor temel olarak iki parçadan oluşur; motorun Stator adı verilen sabit gövdesi ve DC makineler için Rotor veya “Armatür” adı verilen hareketi üreten dönen parça.
Motorların stator sargısı, AC makinelerinin aksine, gerekli olan Kuzey kutbu ve daha sonra bir Güney kutbu vb. stator alanı sürekli uygulanan frekansla birlikte döner.
Bu alan bobinleri içinde akan akım, motor alanı akımı olarak bilinir.
Stator alanını oluşturan bu elektromanyetik bobinler, seri olarak, paralel veya her ikisiyle (bileşik) motor armatürüyle birlikte elektriksel olarak bağlanabilir.Bir seri sargılı DC motor, armatürle seri olarak bağlı stator alan sargılarına sahiptir.
Benzer şekilde, bir şönt sargılı DC motor,resimde de gösterildiği gibi armatürle paralel olarak bağlanmış stator alanı sargılarına sahiptir.
Seri ve Şönt Bağlantılı DC Motor
Bir DC makinesinin rotoru veya armatürü, bir ucunda komütatör adı verilen elektriksel olarak izole edilmiş bakır parçalara bağlı akım taşıyan iletkenlerden oluşur.Komütatör, armatür döndükçe harici bir güç kaynağına karbon fırçalar (dolayısıyla “Fırçalı” motor ) üzerinden elektrik bağlantısı yapılmasını sağlar.
Rotor tarafından yapılan manyetik alan kurulumu, kendisini rotorun kendi ekseni üzerinde dönmesine neden olan sabit stator alanıyla hizalamaya çalışır, ancak birleşme gecikmeleri nedeniyle kendisini hizalayamaz.
Motorun dönme hızı rotorların manyetik alanının gücüne bağlıdır ve motora ne kadar fazla voltaj uygulanırsa rotor o kadar hızlı dönecektir.Bu uygulanan DC voltajı değiştirilerek, motorun dönme hızı da değişebilir.
Fırçalı DC Motor
Kalıcı mıknatıs (PMDC) fırçalı DC motor, genellikle alan sargısı olmadığından eşdeğer sarılı stator tipi DC motorlardan çok daha küçük ve daha ucuzdur.
Sabit mıknatıslı DC (PMDC) motorlarda bu alan bobinleri, çok yüksek manyetik enerji alanlarına sahip güçlü nadir toprak (yani, Samarium Cobolt veya Neodim Demir Bor) tipi mıknatıslarla değiştirilir.
Kalıcı mıknatısların kullanılması, DC motoruna, kalıcı ve bazen çok güçlü manyetik alan nedeniyle eşdeğer sargılı motorlara göre çok daha iyi bir lineer hız/tork karakteristiği verir.
Her ne kadar DC fırçalı motorlar çok verimli ve ucuz olsalar da, fırçalı DC motorla ilgili problemler, kıvılcımın, komütatörün iki yüzeyi ile karbon fırçaları arasında kendiliğinden oluşan ısı, kısa ömür ve kıvılcım nedeniyle elektriksel gürültü ile sonuçlanan ağır yük koşullarında meydana gelmesidir. MOSFET veya transistör gibi herhangi bir yarı iletken anahtarlama cihaza zarar verebilir.
Bu dezavantajların üstesinden gelmek için, Fırçasız DC Motorlar geliştirilmiştir.
Fırçasız DC Motor
Fırçasız DC motor (BDCM), sabit bir mıknatıslı DC motoruna çok benzer, ancak komütatör kıvılcımları nedeniyle değiştirilecek veya yıpranacak fırçalara sahip değildir.
Bu nedenle, rotorda motorların ömrünü uzatan az miktarda ısı üretilir.Fırçasız motorun tasarımı, daha karmaşık bir tahrik devresi kullanarak fırça ihtiyacını ortadan kaldırır, rotor manyetik alanı sürekli stator alanıyla senkronize olan sürekli bir mıknatıs olup daha hassas bir hız ve tork kontrolü sağlar.
O zaman fırçasız bir DC motorun yapısı AC motoruna çok benzer, bu da onu gerçek bir senkron motor haline getirir ancak bir dezavantajı, eşdeğer bir “fırçalanmış” motor tasarımından daha pahalı olmasıdır.
Fırçasız DC motorların kontrolü, normal fırçalı DC motordan çok farklıdır, çünkü bu motor tipi, yarı iletken anahtarlamayı kontrol etmek için gereken geri besleme sinyallerini üretmek için gereken rotorların açısal pozisyonunu (veya manyetik direkleri) tespit etmek için bazı araçlar içerir.
En yaygın konum/kutup sensörü “Hall Efekt Sensörü”dür, ancak bazı motorlar da optik sensörler kullanır.
Hall efekti sensörleri kullanılarak, elektromıknatısların polaritesi motor kontrol tahrik devresi tarafından değiştirilir.Ardından motor, dijital hız sinyaline kolayca senkronize edilebilir ve böylece hassas hız kontrolü sağlanır.
Fırçasız DC motorlar, harici bir sabit mıknatıslı rotor ve bir dahili elektromıknatıs statoru veya bir dahili bir sabit mıknatıslı rotor ve bir harici elektromıknatıs statoru olacak şekilde imal edilebilir.
Fırçasız DC Motorun “fırçalı” olanına kıyasla avantajları daha yüksek verimlilik, yüksek güvenilirlik, düşük elektrik gürültüsü, iyi hız kontrolü ve daha da önemlisi, daha yüksek hızlarda aşınacak fırça veya komütatör değildir.
Ancak dezavantajları, kontrol edilmeleri daha pahalı ve daha karmaşık olmalarıdır.
DC Servo Motor
Kapalı devre tip uygulamalarda kullanılan DC Servo motorlar da, çıkış motor milinin pozisyonu tekrar motor kontrol devresine geri beslenir.
Tipik konumsal “Geri bildirim” cihazları ,endüstri de , uçaklar ve tekneler gibi radyo kontrol modellerinde kullanılan çözücüler, enkoderler ve potansiyometreleri içerir.
Bir servo motor genel olarak hız azaltma için dahili bir dişli kutusu içerir ve doğrudan yüksek tork sağlayabilmektedir.
Bir servo motorun çıkış mili, bağlı olan dişli kutusu ve geri besleme cihazları nedeniyle DC motor milleri gibi serbestçe dönmez.
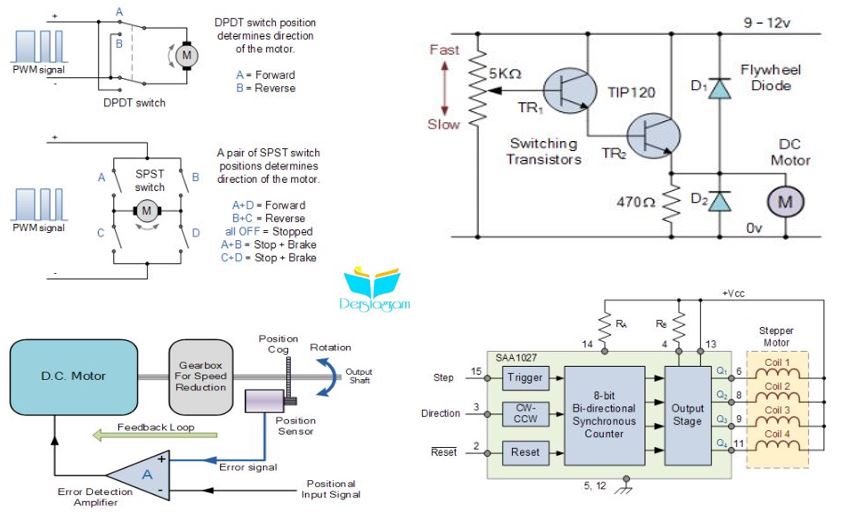
DC Servo Motor Blok Şeması
Bir servo motor bir DC motordan, redüksiyon dişli kutusundan, konumsal geri besleme cihazından ve bir tür hata düzeltmeden oluşur.
Hız veya konum, cihaza uygulanan konumsal giriş sinyaline veya referans sinyale göre kontrol edilir.
Hata algılama amplifikatörü bu giriş sinyaline bakar ve bunu motorların çıkış milinden gelen geri besleme sinyaliyle karşılaştırır ve motor çıkış milinin bir hata durumunda olup olmadığını belirler ve eğer hata varsa denetleyici motoru hızlandıran veya yavaşlatan uygun düzeltmeler yapar.
Konumsal geri besleme cihazına verilen bu yanıt, servo motorun bir “Kapalı Çevrim Sistem” içerisinde çalıştığı anlamına gelir.
Büyük endüstriyel uygulamaların yanı sıra, servo motorlar küçük uzaktan kumandalı modellerde ve robotlarda da kullanılır, çoğu servo motorları her iki yönde yaklaşık 180 dereceye kadar dönebilir ve bunları doğru açısal konumlandırma için ideal kılar.
Bununla birlikte, bu RC tipi servolar, özel olarak değiştirilmediği sürece, klasik DC motorlar gibi sürekli olarak yüksek hızlarda dönemezler.
Bir servo motor, bir paketteki birkaç cihazdan, motordan, dişli kutusundan, geri besleme cihazından ve pozisyon, yön veya hızı kontrol etmek için hata düzeltmesinden oluşur.Robotik ve küçük modellerde yaygın olarak kullanılırlar, çünkü sadece üç kablo, güç, toprak ve sinyal kontrolü kullanılarak kolayca kontrol edilebilirler.
DC Motor Anahtarlama ve Kontrol
Küçük DC motorlar, anahtarların, rölelerin, transistörlerin veya mosfet devreleri vasıtasıyla “en basit” motor kontrol şekli “Doğrusal” kontrol olmak üzere “Açık” veya “Kapalı” olarak çalıştırılabilir.
Bu tip devre, tek bir güç kaynağından motoru kontrol etmek için anahtar olarak bir Bipolar Transistör kullanır (Bir Darlington transistör de kullanılabilirdi, daha yüksek bir akım derecesine ihtiyaç duyulur bu durumda).
Transistöre akan base akım miktarını değiştirerek, örneğin transistör “yarım yollu” çalıştırıldığında motorun hızını kontrol edebilirsiniz, daha sonra besleme voltajının sadece yarısı motora gider. Transistör “tamamen AÇIK” duruma getirildiğinde (doygun), besleme voltajının tamamı motora gider ve daha hızlı döner.
Daha sonra, bu lineer kontrol tipi için, aşağıdaki gibi gösterildiği gibi güç sürekli olarak motora verilir.
Motor Hız Kontrolü
Yukarıdaki basit anahtarlama devresi, tek yönlü (sadece bir yön) motor devri kontrol devresi için devreyi gösterir.Bir DC motorun dönme hızı, terminalleri arasındaki gerilim ile orantılı olduğundan, bir transistör kullanarak bu terminal gerilimini düzenleyebiliriz.
İki transistör, motorun ana armatür akımını kontrol etmek için bir darlington çifti olarak bağlanır. Temel sürücü transistörünü (TR1) kontrol eden birinci ilk transistöre (TR1) göre ana tahrik transistörünü (TR2) kontrol eden 5kΩ bir potansiyometre kullanılır;
Opsiyonel volan diyotları, motorun döndükçe ürettiği herhangi bir geri emmeye karşı koruma için anahtarlama transistörü, TR2 ve motor terminallerine bağlanır.Ayarlanabilir potansiyometre, sırasıyla motoru “tamamen açık” (doygunluk) veya “tamamen kapalı” (kesme) konumuna getirmek için bir mikro kontrolör veya PIC portundan sürekli devre girişine uygulanan “1” veya mantık “0” sinyaliyle değiştirilebilir.
Bu temel hız kontrolünün yanı sıra, aynı devre motorların dönüş hızını kontrol etmek için de kullanılabilir.Motor akımını “on” ve “off” değerlerinin yeterince yüksek bir frekansta art arda açılmasıyla motorun hızı, durma noktası (0 dev/dak) ile tam hız (% 100) arasında değişebilir.
Bu, “açık” olan zamanın (tON) “kapalı” olan zamana (tOFF) oranı değiştirilerek elde edilir ve bu, darbe genişliği modülasyonu(PWM) olarak bilinen bir işlem kullanılarak elde edilebilir.
Darbe Genişliği Hız Kontrolü (PWM)
Daha önce bir DC motorun dönme hızının, terminallerindeki ortalama gerilim değeriyle doğru orantılı olduğunu ve bu değer ne kadar yüksek olursa, izin verilen maksimum motor volta kadar, motorun o kadar hızlı döneceğini söylemiştik.
Başka bir deyişle, daha fazla voltaj daha fazla hız anlamına gelmekteydi.
“On” (tON) zamanı ile “Off” (tOFF) zaman süreleri arasındaki oranı değiştirerek “Çalışma Oranı”, veya “Görev Döngüsü” olarak adlandırılan motor voltajının ortalama değeri ve dolayısıyla dönme hızı değişebilir.
Basit tek kutuplu tahrikler için çalışma oranı β:
Çalışma Saykıl/Oranı = β = a/(a+b) -> a = On zamanı / b= Off zamanı
Ve motora beslenen ortalama DC çıkış voltajı şu şekilde verilir: Vmean = β x Vbesleme
Ardından, darbe a’nın genişliğini değiştirerek, motor voltajı ve dolayısıyla motora uygulanan güç kontrol edilebilir ve bu kontrol tipine Darbe Genişliği Modülasyonu veya PWM denir.
Motorun dönme hızını kontrol etmenin başka bir yolu, “Açık” ve “Kapalı” çalışma oranı süreleri sabit tutulurken frekansı (ve dolayısıyla kontrol voltajının zaman dilimini) değiştirmektir.
Bu kontrol tipine Darbe Frekansı Modülasyonu veya PFM denir.
Darbe frekans modülasyonunda, motor voltajı, örneğin düşük frekansta veya çok az darbeyle değişken frekanslı darbeler uygulanarak kontrol edilir, motora uygulanan ortalama voltaj düşüktür ve bu nedenle motor hızı düşüktür.
Daha yüksek bir frekansta veya çok sayıda darbeyle, ortalama motor terminal voltajı artar ve motor hızı da artar.
Daha sonra, transistörler, bir “motorun” (değişken motor voltajı), “Darbe Genişliği Modülasyonu” (darbe genişliğini değiştiren) bir DC motoruna uygulanan güç miktarını kontrol etmek için kullanılabilir.
Bir DC Motorun Yönünü Ters Çevirme
Tek bir transistörlü bir DC motorun hızını kontrol etmek birçok avantaja sahipken, aynı zamanda bir ana dezavantaja sahiptir ki bu , dönüş yönü her zaman aynıdır ve “Tek yönlü” bir devredir.
Birçok uygulamada motoru ileri ve geri yönde iki yönde çalıştırmamız gerekir.
Bir DC motorun yönünü kontrol etmek için, motorun bağlantılarına uygulanan DC gücünün kutupsallığı, milinin ters yönde dönmesine izin vererek ters çevrilmelidir.Bir DC motorun dönme yönünü kontrol etmenin çok basit ve ucuz bir yolu, resimde de görebileceğiniz şekilde düzenlenmiş farklı anahtarlar kullanmaktır:
DC Motor Yön Kontrolü
İlk devre, motor bağlantılarının kutupsallığını kontrol etmek için tek bir çift kutuplu, çift atışlı (DPDT) anahtar kullanır.Kontaklar değiştirilerek motor terminallerine giden besleme ters çevrilir ve motor yönünü tersine çevirir.
İkinci devre biraz daha karmaşıktır ve “H” yapılandırmasında düzenlenmiş dört adet tek kutuplu, tek kontak (SPST) anahtarı kullanır.
Mekanik anahtarlar anahtar çiftlerinde düzenlenmiştir ve DC motoru çalıştırmak veya durdurmak için belirli bir kombinasyonda çalıştırılmalıdır.
Örneğin, A + D kontaklarının kombinasyonu ileri dönüşü kontrol ederken B + C kontakları gösterilen şekilde ters dönüşü kontrol eder.
Anahtar kombinasyonları A+B veya C+D hızlı bir şekilde frenlenmesine neden olan motor terminallerini devre dışı bırakır.Bununla birlikte, anahtarların bu şekilde kullanılması, A+C veya B+D kontaklarının birlikte çalıştırılmasının güç beslemesini keseceği için tehlikeleri vardır.
Yukarıdaki iki devre, çoğu küçük DC motor uygulaması için çok iyi çalışsa da, gerçekten motor yönünü tersine çevirmek için farklı mekanik anahtar kombinasyonlarını çalıştırmak isteriz.
NO (Normalde açık) Elektromekanik Röle seti için manuel anahtarları değiştirebiliriz ve tek bir ileri-geri düğmesi veya anahtarına sahip olabiliriz ya da bir katı hal CMOS 4066B dörtlü çift anahtar kullanabiliriz.
Ancak, bir motorun iki yönlü kontrolünü (bunun yanı sıra hızı) kontrol etmenin çok iyi bir yolu, motoru resimde de gösterildiği gibi bir Transistör H köprü tipi devre düzeneğine bağlamaktır.
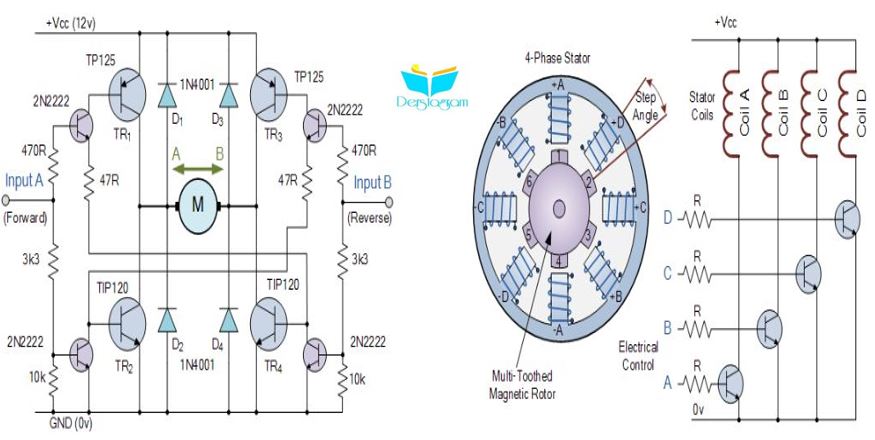
Temel Çift Yönlü H Köprü Devresi
Resimdeki H köprüsü devresi öyle adlandırılmıştır, çünkü dört anahtarın, elektro-mekanik rölelerin veya transistörlerin temel konfigürasyonu, motor merkez çubuk üzerinde konumlandırılmış olarak “H” harfine benzer.
Transistör veya MOSFET H köprüsü kullanılan muhtemelen en yaygın kullanılan iki yönlü DC motor kontrol devrelerinden biridir.
Her bir dalda hem NPN hem de PNP “tamamlayıcı transistör çiftleri” kullanır, transistörler motoru kontrol etmek için çiftler halinde bir araya getirilir.
Kontrol girişi A, motoru bir yönde çalıştırır ve B girişi, motoru diğer yönde çalıştırır.Daha sonra transistörleri “On” veya “Off” olarak “diyagonal çift” olarak değiştirerek motorun yön kontrolü sağlanır.
Örneğin, TR1 transistörü “ON” ve TR2 transistörü “OFF” ise, A noktası besleme voltajına (+ Vcc) ve TR3 transistörü “OFF” ise ve TR4 transistörü “ON” ise B noktasına bağlanırsa 0 volt (GND). Ardından motor, A terminalinin pozitif ve B terminalinin negatif olması için tek yönde dönecektir.
Anahtarlama durumları, TR1 “KAPALI” olacak şekilde ters çevrilirse, TR2 “AÇIK”, TR3 “AÇIK” ve TR4 “KAPALI” ise, motor akımı ters yönde akacak ve motorun ters yönde dönmesine neden olacaktır.
Daha sonra, A ve B girişlerine zıt mantık seviyeleri “1” veya “0” uygulanarak, motorların dönüş yönü aşağıdaki gibi kontrol edilebilir.
H-köprü Gerçeği Tablosu
| Giriş A | Giriş B | Motor Fonksiyonları |
| TR1 ve TR4 | TR2 ve TR3 | |
| 0 | 0 | Motor durdu (off) |
| 1 | 0 | Motor ileri dönüyor |
| 0 | 1 | Motor geri dönüyor |
| 1 | 1 | İzin verilmez.Uygun değil |
Güç kaynağının kısa devre yapmasına neden olabileceği için başka giriş kombinasyonlarına izin verilmemesi önemlidir, yani bu durumda hem transistörler, hem de TR1 ve TR2 aynı anda “AÇIK” duruma getirilmiştir (sigorta = patlama!)
Yukarıda görüldüğü gibi tek yönlü DC motor kontrolünde olduğu gibi, motorun dönme hızı Darbe Genişliği Modülasyonu veya PWM kullanılarak da kontrol edilebilir.
Daha sonra, H köprü geçişini PWM kontrolü ile birleştirerek, motorun yönü ve hızı doğru bir şekilde kontrol edilebilir.
SN754410 Quad Yarım H-Köprü Entegre devresi veya 2-H köprülü olan L298N gibi ticari olarak kullanılan ticari kod çözücüsü entegre’leri, gerekli tüm kontrol ve güvenlik mantığıyla birlikte mevcut olan H köprülü çift yönlü motor kontrol devreleri için özel olarak tasarlanmıştır.
DC Step Motor
Yukarıdaki DC motor gibi, Step Motorlar da darbeli dijital giriş sinyalini ayrık (artımlı) bir mekanik harekete dönüştüren elektromekanik aktüatörlerdir ve endüstriyel kontrol uygulamalarında yaygın olarak kullanılırlar.
Bir kademeli motor, bir komütatör ve karbon fırçalarla bir armatür içermemesi, ancak birçok parçadan oluşan bir rotora sahip olduğu, bazı tiplerde yüzlerce kalıcı manyetik dişe ve tek tek sargılı bir statora sahip olduğu, senkronize fırçasız bir motor türüdür.
Adından da anlaşılacağı gibi, step motor konvansiyonel bir DC motor gibi sürekli bir şekilde dönmez, ancak her dönme hareketinin açısı ya da stator kutupları ve rotorların sayısına bağlı olarak basamaklı, “Adımlar” ya da “Artırmalar” halinde hareket eder ve step motorun dişleri bulunmaktadır.
Ayrık kademeli işlemlerinden dolayı, kademeli motorlar 1.8, 3.6, 7.5 derece vb. gibi bir zamanda bir dönüş işleminin bir kısmını kolayca döndürülebilir.
Örneğin, bir kademeli motorun bir tam devri (360 derece= tam olarak 100 adım olması gibi)
Daha sonra motor için adım açısı 360 derece/100 adım = adım başına -> 3,6 derece olarak verilir. Bu değer genellikle step motorlar Adım Açısı olarak bilinir.
Üç temel step motor tipi vardır: Değişken Relüktans, Kalıcı Mıknatıs ve Hibrit (her ikisinin bir kombinasyonu).
Bir Kademeli Motor özellikle, kademeli motorun başlatılması, durdurulması, geri çevrilmesi ve hız kontrolüne hızlı bir şekilde yanıt vererek doğru konumlandırma elde etmek ve tekrarlanabilirlik gerektiren uygulamalara ve step motorun diğer bir önemli özelliğine sahip olması için özellikle uygundur.
Genel olarak, step motorlarda, stator üzerine monte edilmiş çok sayıda elektromıknatıs “diş” içeren çok sayıda kalıcı mıknatıs içeren bir iç rotor bulunur.
Stator elektromıknatısları kutuplanır ve sırayla depolarize edilir, bu da rotorun bir seferde bir “adım” dönmesine neden olur.
Modern çok kutuplu, çok dişli adım motorları, adım başına 0,9(Devrine göre 400 pals) dereceden daha az hassasiyete sahiptir ve çoğunlukla disket/sabit disk sürücülerinde manyetik kafalar için kullanılanlar, yazıcılar/çiziciler veya robotik uygulamalar gibi son derece hassas konumlandırma sistemleri için kullanılır.
En sık kullanılan step motor, devir başına 200 adımlı step motordur.50 diş rotorlu, 4 fazlı stator ve 1.8 derecelik (360 derece/(50 × 4)) bir adım açısına sahiptir.
Step Motor Yapısı ve Kontrolü
Yukarıdaki değişken relüktans step motoruna ait basit örneğimizde, motor, A, B, C ve D etiketli dört elektromanyetik alan bobini ile çevrili merkezi bir rotordan oluşur.
Aynı harf ile tüm bobinler, enerji veren, yani işaretli olan, manyetik rotorun kendisini bu bobin grubuyla aynı hizada olmasına neden olur.
Her bir bobin grubuna güç uygulanarak, rotor, step açısı yapısı tarafından belirlenen bir açıyla bir pozisyondan diğerine dönmesi veya “adım” yapması ve bobinlerin sırayla enerjilendirilmesiyle rotor bir döner hareket üretecektir.
Kademeli motor sürücüsü, alan bobinlerine örneğin “ADCB, ADCB, ADCB, A…” vb. ayarlanmış bir sırada enerji vererek motorun hem adım açısını hem de hızını kontrol eder, rotor bir yönde (ileri) ve pals dizisini “ABCD, ABCD, ABCD, A…” vb. tersine çevirerek rotor ters yönde (ters) dönecektir.
Bu yüzden yukarıdaki basit örneğimizde, step motorun dört bobini vardır, bunu 4 fazlı bir motor yapar, statordaki kutup sayısı 45 derece aralıklarla aralıklı sekiz (2×4) olur.
Rotordaki diş sayısı, 60 derece olarak -> aralıklı altıdır.
Daha sonra rotorun bir tam devri tamamlaması için 24 (6 diş x 4 bobin) olası pozisyonlar veya “adımlar” vardır.Bu nedenle, yukarıdaki adım açısı şöyle verilmiştir: 360 derece/24 adım = 15 derece
Açıkçası, daha rotor dişleri ve/veya stator bobinleri daha fazla kontrol ve daha ince bir adım açısı ile sonuçlanacaktır.Ayrıca motorun elektrik bobinlerini farklı konfigürasyonlarda bağlayarak Tam, Yarım ve mikro adım açıları mümkündür.
Bununla birlikte, mikro adımlamayı başarmak için step motorun uygulanması pahalı olan (yarı) bir sinüzoidal akımla sürülmesi gerekir.
Bir step motorun dönme hızını, bobinlere uygulanan dijital darbeler (frekans) arasındaki zaman gecikmesini değiştirerek de kontrol etmek mümkündür, gecikme süresi bir tam devir için hız yavaşlar.
Motora sabit bir pals sayısı uygulayarak, motor şaftı belirli bir açıda dönecektir.
Zaman gecikmeli darbe kullanmanın avantajı, herhangi bir ek geri bildirim formuna ihtiyaç duyulmamasıdır, çünkü motora verilen darbe sayısını sayarak rotorun son konumu tam olarak bilinecektir.
Bir dizi dijital giriş darbesine verilen bu tepki, step motorun “Açık Döngü Sisteminde” çalışmasına izin vererek kontrol etmeyi hem daha kolay hem de daha ucuz hale getirir.
Örneğin, yukarıdaki step motorumuzun adım başına 3.6 derece adım açısına sahip olduğunu varsayalım.
Motoru 216 derecelik bir açıyla döndürmek ve sonra istenen pozisyonda tekrar durdurmak için sadece toplamın gerekli olması gerekir:
216 derece/(3.6 derece/adım) = stator bobinlerine uygulanan 80 puls.
Adım adım hızını, dönüş hızını ve motor yönünü kontrol edebilen çok sayıda step motor kontrolörü entegre devre vardır.
Böyle bir denetleyici entegresi, tüm gerekli sayıcı ve kod dönüştürme yeneteğine sahip olan ve motora giden 4 tam kontrollü köprü çıkışını doğru sırada otomatik olarak çalıştırabilen SAA1027’dir.
Dönüş yönü, tek adım modu ile birlikte veya seçilen yönde sürekli (kademesiz) dönüş ile de seçilebilir, ancak bu, kontrol ünitesine biraz yük getirir.
8 bitlik bir dijital kontrol cihazı kullanırken, adım başına 256 mikro adım da mümkündür
SAA1027 Step Motor Kontrol Çipi
Dönme Aktüatörleri ile ilgili bu yazıda, fırçalı ve fırçasız DC Motor, DC Servo Motor ve Step Motoruna konumsal veya hız kontrolü için bir çıkış aracı olarak kullanılabilecek bir elektromekanik aktüatör olarak baktık.
DC & STEP MOTORLAR SONUÇ :
Bugün DC & Step motorlar hakkında geniş bir inceleme yaptık.Umuyorum faydalı olmuştur sizlere.
Giriş/Çıkış cihazları hakkındaki bir sonraki derste, Aktüatörler adı verilen çıkış aygıtlarına ve özellikle elektromanyetizma kullanarak bir elektrik sinyalini tekrar ses dalgalarına dönüştüren çıkış aygıtlarına bakmaya devam edeceğiz. Bir sonraki derste inceleyeceğimiz çıkış cihazı tipi Hoparlör.